|
| | TankDriveRoboteq (HardwareSerial &serial, JoystickController &driveStick) |
| | Constructor. More...
|
| |
| | TankDriveRoboteq (HardwareSerial &serial, ServoDispatch &dispatch, int leftNum, int rightNum, JoystickController &driveStick) |
| | Constructor. More...
|
| |
| | TankDriveRoboteq (HardwareSerial &serial, ServoDispatch &dispatch, int leftNum, int rightNum, int throttleNum, JoystickController &driveStick) |
| | Constructor. More...
|
| |
| | TankDriveRoboteq (ServoDispatch &dispatch, int leftNum, int rightNum, JoystickController &driveStick) |
| | Constructor. More...
|
| |
| | TankDriveRoboteq (ServoDispatch &dispatch, int leftNum, int rightNum, int throttleNum, JoystickController &driveStick) |
| | Constructor. More...
|
| |
| virtual void | setup () override |
| | Subclasses must implement this function to perform any necessary setup that cannot happen in the constructor. More...
|
| |
| virtual void | stop () override |
| |
| virtual bool | enterCommandMode () |
| |
| virtual void | leaveCommandMode () |
| |
| virtual bool | isCommandModeActive () |
| |
| virtual void | moveMillimeters (double mm, float speed=0.1) |
| |
| virtual void | turnDegrees (double degrees, float speed=0.1) |
| |
| | TankDrive (JoystickController &driveStick) |
| | Constructor. More...
|
| |
| bool | getEnable () |
| |
| void | setEnable (bool enable) |
| |
| uint32_t | getSerialLatency () |
| |
| void | setSerialLatency (uint32_t ms) |
| |
| bool | getChannelMixing () |
| |
| void | setChannelMixing (bool mixing) |
| |
| bool | getThrottleInverted () |
| |
| void | setThrottleInverted (bool invert) |
| |
| bool | getTurnInverted () |
| |
| void | setTurnInverted (bool invert) |
| |
| bool | getScaling () |
| |
| void | setScaling (bool scaling) |
| |
| float | getMaxSpeed () |
| |
| void | setMaxSpeed (float modifier) |
| |
| unsigned | getThrottleAccelerationScale () |
| |
| void | setThrottleAccelerationScale (unsigned scale) |
| |
| unsigned | getThrottleDecelerationScale () |
| |
| void | setThrottleDecelerationScale (unsigned scale) |
| |
| unsigned | getTurnAccelerationScale () |
| |
| void | setTurnAccelerationScale (unsigned scale) |
| |
| unsigned | getTurnDecelerationScale () |
| |
| void | setTurnDecelerationScale (unsigned scale) |
| |
| void | setAccelerationScale (unsigned scale) |
| |
| void | setDecelerationScale (unsigned scale) |
| |
| void | setDriveStick (JoystickController &driveStick) |
| |
| void | setGuestStick (JoystickController &guestStick) |
| |
| float | getGuestSpeedModifier () |
| |
| void | setGuestSpeedModifier (float maxGuestSpeed) |
| |
| void | setTargetSteering (TargetSteering *target) |
| |
| bool | useThrottle () |
| |
| bool | useHardStop () |
| |
| bool | useLeftStick () |
| |
| bool | useRightStick () |
| |
| void | setUseThrottle (bool use) |
| |
| void | setUseHardStop (bool use) |
| |
| void | setUseLeftStick () |
| |
| void | setUseRightStick () |
| |
| JoystickController * | getActiveStick () |
| |
| virtual void | animate () override |
| | Dispatch any received i2c event to CommandEvent. More...
|
| |
| | SetupEvent () |
| | Default Constructor. More...
|
| |
| | AnimatedEvent () |
| | Default Constructor. More...
|
| |
| void | setLoopDoneCallback (AnimatedLoopDone loopProc) |
| |
| double | getDroidDiameterMM () |
| |
| double | getWheelCircumferenceMM () |
| |
| double | getWheelTurnCount () |
| |
| double | getDroidCircumference () |
| |
| int | getMoveDistanceCount (double millimeters) |
| |
| int | getTurnDistanceCount (double turnDegrees) |
| |
| void | moveInches (double inches) |
| |
| void | moveFeet (double feet) |
| |
| void | moveMeters (double meters) |
| |
| void | moveCentimeters (double meters) |
| |



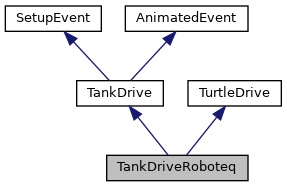
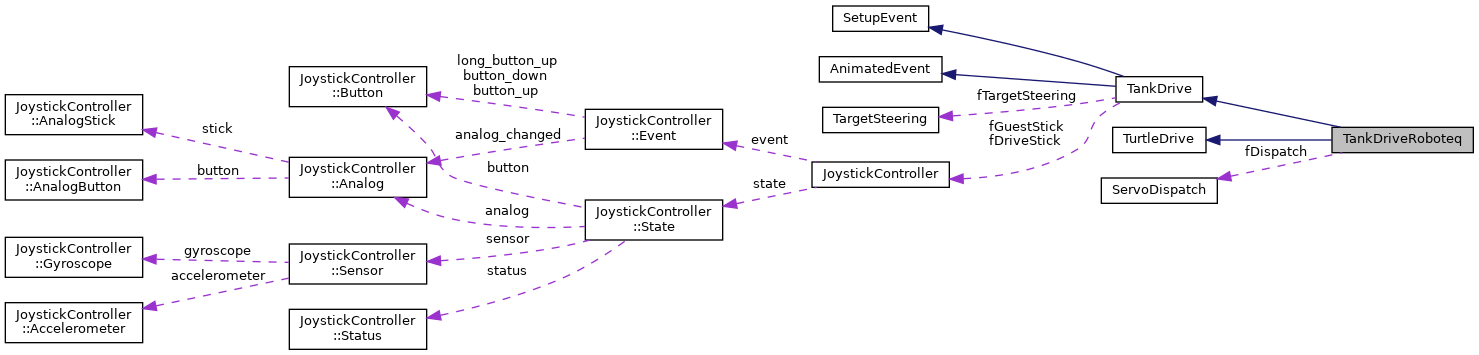
 Inheritance diagram for TankDriveRoboteq:
Inheritance diagram for TankDriveRoboteq: 1.8.17
1.8.17