template<uint8_t numServos>
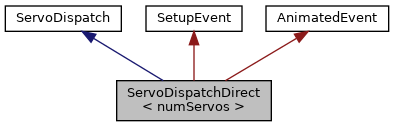
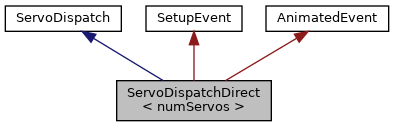
class ServoDispatchDirect< numServos >
Implements ServoDispatch dirctly on PWM enabled outputs.
|
| | ServoDispatchDirect () |
| |
| | ServoDispatchDirect (const ServoSettings *settings) |
| |
| virtual uint16_t | getNumServos () override |
| |
| virtual uint8_t | getPin (uint16_t num) override |
| |
| virtual uint16_t | getStart (uint16_t num) override |
| |
| virtual uint16_t | getEnd (uint16_t num) override |
| |
| virtual uint16_t | getMinimum (uint16_t num) override |
| |
| virtual uint16_t | getNeutral (uint16_t num) override |
| |
| virtual uint16_t | getMaximum (uint16_t num) override |
| |
| virtual uint32_t | getGroup (uint16_t num) override |
| |
| virtual uint16_t | currentPos (uint16_t num) override |
| |
| virtual void | setServo (uint16_t num, uint8_t pin, uint16_t startPulse, uint16_t endPulse, uint16_t neutralPulse, uint32_t group) override |
| |
| virtual void | stop () override |
| |
| virtual uint16_t | scaleToPos (uint16_t num, float scale) override |
| |
| virtual void | setup () override |
| | Subclasses must implement this function to perform any necessary setup that cannot happen in the constructor. More...
|
| |
| virtual bool | isActive (uint16_t num) override |
| |
| virtual void | disable (uint16_t num) override |
| |
| virtual void | animate () override |
| | Subclasses must implement this function to run through a single frame of animation/activity. More...
|
| |
| virtual void | setPWM (uint16_t channel, uint16_t targetLength) override |
| |
| virtual void | setPin (uint16_t num, uint16_t pin) |
| |
| virtual void | setNeutral (uint16_t num, uint16_t neutralPulse) |
| |
| virtual void | setStart (uint16_t num, uint16_t startPulse) |
| |
| virtual void | setEnd (uint16_t num, uint16_t endPulse) |
| |
| virtual void | setGroup (uint16_t num, uint32_t group) |
| |
| void | moveTo (uint16_t num, uint32_t startDelay, uint32_t moveTime, float pos) |
| |
| void | moveTo (uint16_t num, uint32_t moveTime, float pos) |
| |
| void | moveTo (uint16_t num, float pos) |
| |
| void | moveTo (uint16_t num, uint32_t startDelay, uint32_t moveTime, float startPos, float pos) |
| |
| void | moveServosTo (uint32_t servoGroupMask, float pos) |
| |
| void | moveServosTo (uint32_t servoGroupMask, uint32_t moveTime, float pos) |
| |
| void | moveServosTo (uint32_t servoGroupMask, uint32_t startDelay, uint32_t moveTime, float pos) |
| |
| void | moveServosTo (uint32_t servoGroupMask, uint32_t startDelay, uint32_t moveTimeMin, uint32_t moveTimeMax, float pos) |
| |
| void | moveServoSetTo (uint32_t servoGroupMask, uint32_t servoSetMask, float onPos, float offPos, float(*onEasingMethod)(float)=NULL, float(*offEasingMethod)(float)=NULL) |
| |
| void | moveServoSetTo (uint32_t servoGroupMask, uint32_t servoSetMask, uint32_t moveTime, float onPos, float offPos, float(*onEasingMethod)(float)=NULL, float(*offEasingMethod)(float)=NULL) |
| |
| void | moveServoSetTo (uint32_t servoGroupMask, uint32_t servoSetMask, uint32_t startDelay, uint32_t moveTime, float onPos, float offPos, float(*onEasingMethod)(float)=NULL, float(*offEasingMethod)(float)=NULL) |
| |
| void | moveServoSetTo (uint32_t servoGroupMask, uint32_t servoSetMask, uint32_t startDelay, uint32_t moveTimeMin, uint32_t moveTimeMax, float onPos, float offPos, float(*onEasingMethod)(float)=NULL, float(*offEasingMethod)(float)=NULL) |
| |
| void | moveToPulse (uint16_t num, uint32_t startDelay, uint32_t moveTime, uint16_t pos) |
| |
| void | moveToPulse (uint16_t num, uint32_t moveTime, uint16_t pos) |
| |
| void | moveToPulse (uint16_t num, uint16_t pos) |
| |
| void | moveToPulse (uint16_t num, uint32_t startDelay, uint32_t moveTime, uint16_t startPos, uint16_t pos) |
| |
| void | moveByPulse (uint16_t num, uint32_t moveTime, int16_t pos) |
| |
| void | moveByPulse (uint16_t num, int16_t pos) |
| |
| void | moveByPulse (uint16_t num, uint32_t startDelay, uint32_t moveTime, int16_t pos) |
| |
| void | moveServosToPulse (uint32_t servoGroupMask, uint16_t pos) |
| |
| void | moveServosToPulse (uint32_t servoGroupMask, uint32_t moveTime, uint16_t pos) |
| |
| void | moveServosToPulse (uint32_t servoGroupMask, uint32_t startDelay, uint32_t moveTime, uint16_t pos) |
| |
| void | moveServosToPulse (uint32_t servoGroupMask, uint32_t startDelay, uint32_t moveTimeMin, uint32_t moveTimeMax, int16_t pos) |
| |
| void | moveServosByPulse (uint32_t servoGroupMask, uint32_t moveTime, uint16_t pos) |
| |
| void | moveServosByPulse (uint32_t servoGroupMask, uint32_t startDelay, uint32_t moveTime, int16_t pos) |
| |
| void | moveServosByPulse (uint32_t servoGroupMask, uint32_t startDelay, uint32_t moveTimeMin, uint32_t moveTimeMax, int16_t pos) |
| |
| void | moveServoSetToPulse (uint32_t servoGroupMask, uint32_t servoSetMask, uint16_t onPos, uint16_t offPos) |
| |
| void | moveServoSetToPulse (uint32_t servoGroupMask, uint32_t servoSetMask, uint32_t moveTime, uint16_t onPos, uint16_t offPos) |
| |
| void | moveServoSetToPulse (uint32_t servoGroupMask, uint32_t servoSetMask, uint32_t startDelay, uint32_t moveTime, uint16_t onPos, uint16_t offPos) |
| |
| void | moveServoSetToPulse (uint32_t servoGroupMask, uint32_t servoSetMask, uint32_t startDelay, uint32_t moveTimeMin, uint32_t moveTimeMax, int16_t onPos, int16_t offPos) |
| |
| void | moveServoSetByPulse (uint32_t servoGroupMask, uint32_t servoSetMask, uint32_t moveTime, int16_t onPos, int16_t offPos) |
| |
| void | moveServoSetByPulse (uint32_t servoGroupMask, uint32_t servoSetMask, uint32_t startDelay, uint32_t moveTime, int16_t onPos, int16_t offPos) |
| |
| void | moveServoSetByPulse (uint32_t servoGroupMask, uint32_t servoSetMask, uint32_t startDelay, uint32_t moveTimeMin, uint32_t moveTimeMax, int16_t onPos, int16_t offPos) |
| |
| void | setServoEasingMethod (uint16_t num, float(*easingMethod)(float completion)) |
| |
| void | setServosEasingMethod (uint32_t servoGroupMask, float(*easingMethod)(float completion)) |
| |
| void | setEasingMethod (float(*easingMethod)(float completion)) |
| |



 Inheritance diagram for ServoDispatchDirect< numServos >:
Inheritance diagram for ServoDispatchDirect< numServos >: 1.8.17
1.8.17