#include <drive/DomeDrive.h>
Base template of automatic forwarder from i2c to CommandEvent.
|
| static bool | withinArc (double p1, double p2, double p3) |
| |
◆ DomeMode
| Enumerator |
|---|
| kOff | |
| kHome | |
| kRandom | |
◆ DomeDrive()
Constructor.
Only a single instance of WifiSerialBridge should be created per sketch.
- Parameters
-
| port | the port number of this service |
◆ animate()
| virtual void DomeDrive::animate |
( |
| ) |
|
|
inlineoverridevirtual |
Subclasses must implement this function to run through a single frame of animation/activity.
Subclasses should not call delay() or otherwise block.
Implements AnimatedEvent.
◆ autonomousDriveDome()
| virtual void DomeDrive::autonomousDriveDome |
( |
float |
m | ) |
|
|
inlinevirtual |
◆ checkError()
| bool DomeDrive::checkError |
( |
| ) |
|
|
inline |
◆ domeStick()
◆ driveDome()
| virtual void DomeDrive::driveDome |
( |
float |
m | ) |
|
|
inlinevirtual |
◆ getActiveStick()
◆ getEnable()
| bool DomeDrive::getEnable |
( |
| ) |
const |
|
inline |
◆ getInverted()
| bool DomeDrive::getInverted |
( |
| ) |
const |
|
inline |
◆ getMaxSpeed()
| float DomeDrive::getMaxSpeed |
( |
| ) |
const |
|
inline |
◆ getScaling()
| bool DomeDrive::getScaling |
( |
| ) |
const |
|
inline |
◆ getSerialLatency()
| uint32_t DomeDrive::getSerialLatency |
( |
| ) |
const |
|
inline |
◆ getSpeed()
| float DomeDrive::getSpeed |
( |
float |
percentage | ) |
|
|
inlineprotected |
◆ getThrottle()
| virtual float DomeDrive::getThrottle |
( |
| ) |
|
|
inlineprotectedvirtual |
◆ getThrottleAccelerationScale()
| unsigned DomeDrive::getThrottleAccelerationScale |
( |
| ) |
const |
|
inline |
◆ getThrottleDecelerationScale()
| unsigned DomeDrive::getThrottleDecelerationScale |
( |
| ) |
const |
|
inline |
◆ idle()
| virtual bool DomeDrive::idle |
( |
| ) |
|
|
inlinevirtual |
◆ isMoving()
| bool DomeDrive::isMoving |
( |
| ) |
|
|
inline |
◆ motor()
| virtual void DomeDrive::motor |
( |
float |
m | ) |
|
|
protectedpure virtual |
◆ moveDomeToTarget()
| bool DomeDrive::moveDomeToTarget |
( |
int |
pos, |
|
|
int |
target, |
|
|
int |
fudge, |
|
|
float |
speed, |
|
|
float & |
m |
|
) |
| |
|
inlineprotected |
◆ normalize()
| int DomeDrive::normalize |
( |
int |
degrees | ) |
|
|
inlineprotected |
◆ setDomePosition()
| void DomeDrive::setDomePosition |
( |
DomePosition * |
domePosition | ) |
|
|
inline |
◆ setDomeStick()
◆ setEnable()
| void DomeDrive::setEnable |
( |
bool |
enable | ) |
|
|
inline |
◆ setInverted()
| void DomeDrive::setInverted |
( |
bool |
invert | ) |
|
|
inline |
◆ setMaxSpeed()
| void DomeDrive::setMaxSpeed |
( |
float |
modifier | ) |
|
|
inline |
◆ setScaling()
| void DomeDrive::setScaling |
( |
bool |
scaling | ) |
|
|
inline |
◆ setSerialLatency()
| void DomeDrive::setSerialLatency |
( |
uint32_t |
ms | ) |
|
|
inline |
◆ setThrottleAccelerationScale()
| void DomeDrive::setThrottleAccelerationScale |
( |
unsigned |
scale | ) |
|
|
inline |
◆ setThrottleDecelerationScale()
| void DomeDrive::setThrottleDecelerationScale |
( |
unsigned |
scale | ) |
|
|
inline |
◆ setup()
| virtual void DomeDrive::setup |
( |
| ) |
|
|
inlineoverridevirtual |
◆ setUseHardStop()
| void DomeDrive::setUseHardStop |
( |
bool |
use | ) |
|
|
inline |
◆ setUseLeftStick()
| void DomeDrive::setUseLeftStick |
( |
| ) |
|
|
inline |
◆ setUseRightStick()
| void DomeDrive::setUseRightStick |
( |
| ) |
|
|
inline |
◆ setUseThrottle()
| void DomeDrive::setUseThrottle |
( |
bool |
use | ) |
|
|
inline |
◆ shortestDistance()
| int DomeDrive::shortestDistance |
( |
int |
origin, |
|
|
int |
target |
|
) |
| |
|
inlineprotected |
◆ stop()
| virtual void DomeDrive::stop |
( |
| ) |
|
|
inlinevirtual |
◆ throttleSpeed()
| virtual float DomeDrive::throttleSpeed |
( |
float |
speedModifier | ) |
|
|
inlineprotectedvirtual |
◆ useHardStop()
| bool DomeDrive::useHardStop |
( |
| ) |
|
|
inline |
◆ useLeftStick()
| bool DomeDrive::useLeftStick |
( |
| ) |
|
|
inline |
◆ useRightStick()
| bool DomeDrive::useRightStick |
( |
| ) |
|
|
inline |
◆ useThrottle()
| bool DomeDrive::useThrottle |
( |
| ) |
|
|
inline |
◆ withinArc()
| static bool DomeDrive::withinArc |
( |
double |
p1, |
|
|
double |
p2, |
|
|
double |
p3 |
|
) |
| |
|
inlinestaticprotected |
◆ fAutoDomeGoHome
| bool DomeDrive::fAutoDomeGoHome = false |
|
protected |
◆ fAutoDomeLeft
| bool DomeDrive::fAutoDomeLeft = random(1) |
|
protected |
◆ fAutoDomeTargetPos
| int DomeDrive::fAutoDomeTargetPos = 0 |
|
protected |
◆ fAutoDrive
| float DomeDrive::fAutoDrive = 0 |
|
protected |
◆ fComplete
| void(* DomeDrive::fComplete) () = nullptr |
|
protected |
◆ fDomeMovementStarted
| bool DomeDrive::fDomeMovementStarted = false |
|
protected |
◆ fDomePosition
◆ fDomeStick
◆ fDomeThrottle
| float DomeDrive::fDomeThrottle = 0 |
|
protected |
◆ fDrive
| float DomeDrive::fDrive = 0 |
|
protected |
◆ fEnabled
| bool DomeDrive::fEnabled = false |
|
protected |
◆ fError
| bool DomeDrive::fError = false |
|
protected |
◆ fIdle
| bool DomeDrive::fIdle = true |
|
protected |
◆ fInverted
| bool DomeDrive::fInverted = false |
|
protected |
◆ fLastCommand
| uint32_t DomeDrive::fLastCommand = 0 |
|
protected |
◆ fLastDomeMode
| int DomeDrive::fLastDomeMode = -1 |
|
protected |
◆ fLastDomeMovement
| uint32_t DomeDrive::fLastDomeMovement = 0 |
|
protected |
◆ fLastDomePosition
| int DomeDrive::fLastDomePosition = -1 |
|
protected |
◆ fMotorStopped
| bool DomeDrive::fMotorStopped = false |
|
protected |
◆ fMovementFinishTime
| uint32_t DomeDrive::fMovementFinishTime = 0 |
|
protected |
◆ fMovementStartTime
| uint32_t DomeDrive::fMovementStartTime = 0 |
|
protected |
◆ fMoving
| bool DomeDrive::fMoving = false |
|
protected |
◆ fNextAutoDomeMovement
| uint32_t DomeDrive::fNextAutoDomeMovement = 0 |
|
protected |
◆ fScaling
| bool DomeDrive::fScaling = false |
|
protected |
◆ fSerialLatency
| uint32_t DomeDrive::fSerialLatency = 0 |
|
protected |
◆ fSpeedModifier
| float DomeDrive::fSpeedModifier |
|
protected |
◆ fThrottleAccelerationScale
| unsigned DomeDrive::fThrottleAccelerationScale = 0 |
|
protected |
◆ fThrottleDecelerationScale
| unsigned DomeDrive::fThrottleDecelerationScale = 0 |
|
protected |
◆ fUseHardStop
| bool DomeDrive::fUseHardStop = false |
|
protected |
◆ fUseLeftStick
| bool DomeDrive::fUseLeftStick = false |
|
protected |
◆ fUseThrottle
| bool DomeDrive::fUseThrottle = true |
|
protected |
◆ fWasConnected
| bool DomeDrive::fWasConnected = false |
|
protected |
The documentation for this class was generated from the following file:



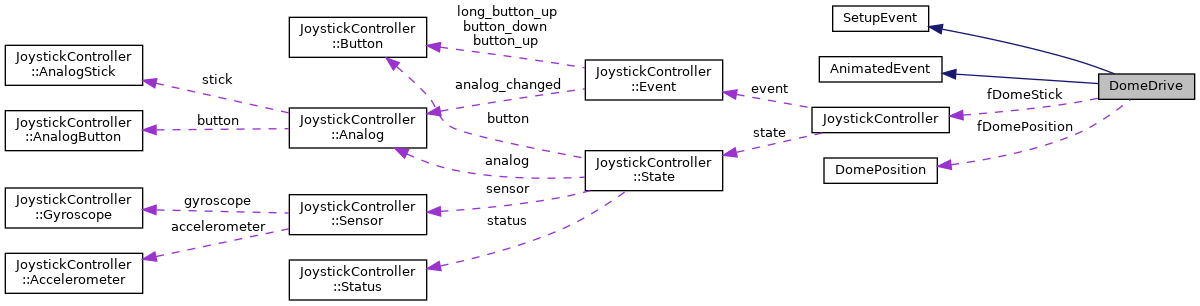
 Inheritance diagram for DomeDrive:
Inheritance diagram for DomeDrive: 1.8.17
1.8.17