|
RSeries astromech firmware
|


|
|
RSeries astromech firmware
|
|
#include <dome/BadMotivator.h>
Controls a relay to a smoke machine and some LEDs.
Smoke will run for a maximum of 6.5 seconds with a minimum of 5 minute pause in between activations.
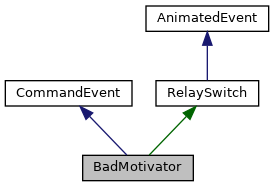
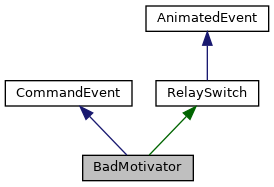
 Inheritance diagram for BadMotivator: Collaboration diagram for BadMotivator:
Inheritance diagram for BadMotivator: Collaboration diagram for BadMotivator:Public Member Functions | |
| BadMotivator (byte smokeRelayPin) | |
| Constructor. More... | |
| void | smokeOn () |
| Turn on the smoke machine. More... | |
| void | smokeOff () |
| Turn off the smoke machine. More... | |
| virtual void | handleCommand (const char *cmd) override |
| BadMotivator Commands start with 'BM'. More... | |
| Public Member Functions inherited from CommandEvent | |
| CommandEvent () | |
| Default Constructor. More... | |
| virtual void | handleCommand (String cmd) |
| Subclasses should implement this function to process commands specific to their device. More... | |
Additional Inherited Members | |
| Static Public Member Functions inherited from CommandEvent | |
| static void | process (char *cmd) |
| Calls handleCommand() for each created CommandEvent subclass. More... | |
| static void | process (const char *cmd) |
| Calls handleCommand() for each created CommandEvent subclass. More... | |
| static void | process (PROGMEMString pcmd) |
| Calls handleCommand() for each created CommandEvent subclass. More... | |
| Protected Member Functions inherited from RelaySwitch | |
| RelaySwitch (byte relayPin, uint32_t pauseTime=0) | |
| Constructor. More... | |
| void | relayOn (uint32_t switchOffMS=0) |
| Turn on the smoke machine. More... | |
| void | relayOff () |
| Turn off the smoke machine. More... | |
| virtual void | animate () override |
| Check if smoke machine timer has expired. More... | |
| Protected Member Functions inherited from AnimatedEvent | |
| AnimatedEvent () | |
| Default Constructor. More... | |
| void | setLoopDoneCallback (AnimatedLoopDone loopProc) |
| Static Protected Member Functions inherited from AnimatedEvent | |
| static void | process () |
| Calls animate() for each created AnimatedEvent subclass. More... | |
|
inline |
Constructor.
|
inlineoverridevirtual |
BadMotivator Commands start with 'BM'.
Implements CommandEvent.
|
inline |
Turn off the smoke machine.
|
inline |
Turn on the smoke machine.
A minimum of 5 minutes have to pass in between activations and the smoke will be automatically stopped after 6.5 seconds.
 1.8.17
1.8.17