#include <drive/SerialConsoleController.h>
◆ anonymous enum
| Enumerator |
|---|
| kHome | |
| kPageUp | |
| kPageDown | |
| kEnd | |
◆ SerialConsoleController()
| SerialConsoleController::SerialConsoleController |
( |
Stream & |
serial | ) |
|
|
inline |
◆ connect()
| void SerialConsoleController::connect |
( |
| ) |
|
|
inline |
◆ decreaseSpeed()
| void SerialConsoleController::decreaseSpeed |
( |
| ) |
|
|
inline |
◆ disconnect()
| virtual void SerialConsoleController::disconnect |
( |
| ) |
|
|
inlineoverridevirtual |
◆ getSpeed()
| float SerialConsoleController::getSpeed |
( |
| ) |
|
|
inline |
◆ increaseSpeed()
| void SerialConsoleController::increaseSpeed |
( |
| ) |
|
|
inline |
◆ isEmulationActive()
| bool SerialConsoleController::isEmulationActive |
( |
| ) |
const |
|
inline |
◆ read()
| int SerialConsoleController::read |
( |
| ) |
|
|
inlineprotected |
◆ readCharBlocking()
| char SerialConsoleController::readCharBlocking |
( |
| ) |
|
|
inlineprotected |
◆ setSpeed()
| void SerialConsoleController::setSpeed |
( |
float |
speed | ) |
|
|
inline |
◆ update()
| void SerialConsoleController::update |
( |
| ) |
|
|
inline |
◆ updateDirection()
| static uint16_t SerialConsoleController::updateDirection |
( |
float |
speed | ) |
|
|
inlinestaticprotected |
◆ button
| bool SerialConsoleController::button[5] |
◆ circle
◆ cross
◆ fEmulationActive
| bool SerialConsoleController::fEmulationActive = false |
|
protected |
◆ fLastTime
| uint32_t SerialConsoleController::fLastTime = 0 |
|
protected |
◆ fSerial
| Stream* SerialConsoleController::fSerial = nullptr |
|
protected |
◆ fSpeed
| float SerialConsoleController::fSpeed = 0.5 |
|
protected |
◆ l3
◆ lastPacket
| uint32_t SerialConsoleController::lastPacket |
◆ longpress
| struct { ... } SerialConsoleController::longpress |
◆ square
◆ triangle
◆ w1
| uint16_t SerialConsoleController::w1 |
◆ w2
| uint16_t SerialConsoleController::w2 |
| uint16_t SerialConsoleController::x |
| uint16_t SerialConsoleController::y |
The documentation for this class was generated from the following file:



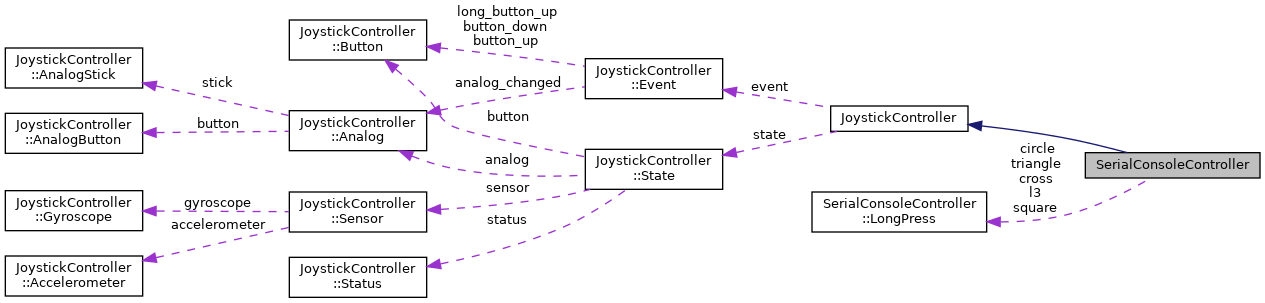
 Inheritance diagram for SerialConsoleController:
Inheritance diagram for SerialConsoleController: 1.8.17
1.8.17