#include <motor/CytronSmartDriveDuoDriver.h>
◆ CytronSmartDriveDuoDriver()
| CytronSmartDriveDuoDriver::CytronSmartDriveDuoDriver |
( |
byte |
address, |
|
|
Stream & |
port, |
|
|
uint8_t |
initialByte = 0x80 |
|
) |
| |
|
inline |
Initializes a new instance of the Sabertooth class. The driver address is set to the value given, and the specified serial port is used.
- Parameters
-
| address | The driver address. |
| port | The port to use. |
◆ address()
| byte CytronSmartDriveDuoDriver::address |
( |
| ) |
const |
|
inline |
Gets the driver address.
- Returns
- The driver address.
◆ autobaud()
| void CytronSmartDriveDuoDriver::autobaud |
( |
boolean |
dontWait = false | ) |
const |
|
inline |
Sends the autobaud character.
- Parameters
-
| dontWait | If false, a delay is added to give the driver time to start up. |
◆ drive()
| void CytronSmartDriveDuoDriver::drive |
( |
int |
power | ) |
|
|
inline |
Sets the driving power.
- Parameters
-
| power | The power, between -127 and 127. |
◆ motor() [1/2]
| void CytronSmartDriveDuoDriver::motor |
( |
int |
power | ) |
|
|
inline |
◆ motor() [2/2]
| void CytronSmartDriveDuoDriver::motor |
( |
int |
powerLeft, |
|
|
int |
powerRight |
|
) |
| |
|
inline |
Independent motor command.
- Parameters
-
| power | The power, between -127 and 127. |
◆ setAddress()
| void CytronSmartDriveDuoDriver::setAddress |
( |
byte |
addr | ) |
|
|
inline |
Sets the driver address.
- Returns
- The driver address.
◆ setDeadband()
| void CytronSmartDriveDuoDriver::setDeadband |
( |
byte |
value | ) |
|
|
inline |
◆ setTimeout()
| void CytronSmartDriveDuoDriver::setTimeout |
( |
int |
milliseconds | ) |
|
|
inline |
◆ stop()
| void CytronSmartDriveDuoDriver::stop |
( |
| ) |
|
|
inline |
◆ turn()
| void CytronSmartDriveDuoDriver::turn |
( |
int |
power | ) |
|
|
inline |
Sets the turning power.
- Parameters
-
| power | The power, between -127 and 127. |
The documentation for this class was generated from the following file:



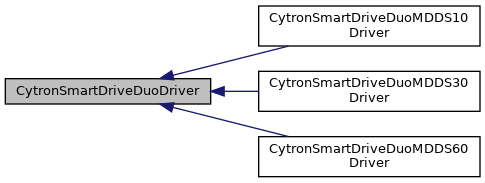
 Inheritance diagram for CytronSmartDriveDuoDriver:
Inheritance diagram for CytronSmartDriveDuoDriver: 1.8.17
1.8.17