#include "ReelTwo.h"
#include "core/SetupEvent.h"
#include "core/AnimatedEvent.h"
#include "core/CommandEvent.h"
#include "Orientation.h"
#include "USBSabertooth_NB.h"
Go to the source code of this file.
|
| class | Stance |
| | Manages transition from 2 to 3 legged stance using 4 limit switches. More...
|
| |
◆ MOTOR_FULL_POWER
| #define MOTOR_FULL_POWER 2047 |
◆ MOTOR_HALF_3QUARTERS
| #define MOTOR_HALF_3QUARTERS 1400 |
◆ MOTOR_HALF_POWER
| #define MOTOR_HALF_POWER 1024 |
◆ MOTOR_QUARTER_POWER
| #define MOTOR_QUARTER_POWER 300 |
◆ TILT_MOTOR_FULL_POWER
| #define TILT_MOTOR_FULL_POWER 2047 |
◆ YOKE_ANGLE_2LEGS_LIMIT
| #define YOKE_ANGLE_2LEGS_LIMIT -10 /* limit switch triggers at -10 */ |
◆ YOKE_ANGLE_2LEGS_TARGET
| #define YOKE_ANGLE_2LEGS_TARGET -13 |
◆ YOKE_ANGLE_2TO3LEGS_SLOWDOWN
| #define YOKE_ANGLE_2TO3LEGS_SLOWDOWN 20 |
◆ YOKE_ANGLE_3LEGS_TARGET
| #define YOKE_ANGLE_3LEGS_TARGET 23 |
◆ YOKE_ANGLE_CENTER_LEG_START
| #define YOKE_ANGLE_CENTER_LEG_START -10 |



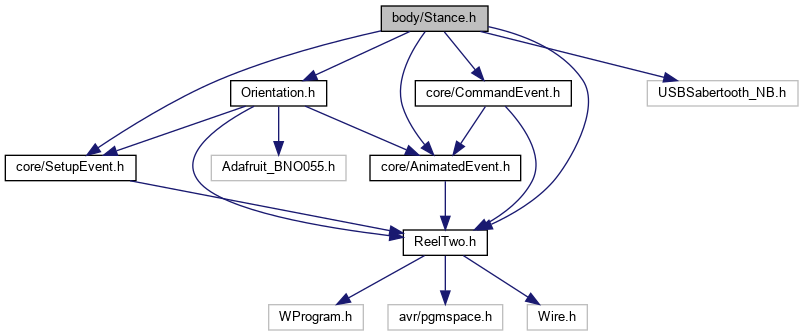
 Include dependency graph for Stance.h:
Include dependency graph for Stance.h: 1.8.17
1.8.17